林宥呈 21 March 2026 討論區 線性代數習題討論 參考解答 QWQ. 週一, 2026-03-23 12:25 (1) 若 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly dependent, 表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.\[c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n = \mathbf{0}_V\]則 \[T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = T(\mathbf{0}_V)\] 因 \(T\) 為 linear transformation, \[c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W\] ∴ \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly dependent.故由 contrapositive method(反證法), 知若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly independent,則 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent.(2) 若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly dependent, 表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.\[c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W\]因 \(T\) 為 linear transformation, \[T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = \mathbf{0}_W\] ∴ \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in N(T)\)此時由假設 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent,且 \(c_1, \dots, c_n\) 不全為 \(0\),知 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \neq \mathbf{0}_V\)又 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in \operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n)\), ∴ \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) \neq \{\mathbf{0}_V\}\)故由 contrapositive method(反證法), 知若 \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) = \{\mathbf{0}_V\}\),則 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly independent. 登入 或 註冊 以發表評論。
參考解答 QWQ. 週一, 2026-03-23 12:25 (1) 若 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly dependent, 表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.\[c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n = \mathbf{0}_V\]則 \[T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = T(\mathbf{0}_V)\] 因 \(T\) 為 linear transformation, \[c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W\] ∴ \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly dependent.故由 contrapositive method(反證法), 知若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly independent,則 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent.(2) 若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly dependent, 表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.\[c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W\]因 \(T\) 為 linear transformation, \[T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = \mathbf{0}_W\] ∴ \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in N(T)\)此時由假設 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent,且 \(c_1, \dots, c_n\) 不全為 \(0\),知 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \neq \mathbf{0}_V\)又 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in \operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n)\), ∴ \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) \neq \{\mathbf{0}_V\}\)故由 contrapositive method(反證法), 知若 \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) = \{\mathbf{0}_V\}\),則 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly independent. 登入 或 註冊 以發表評論。

參考解答
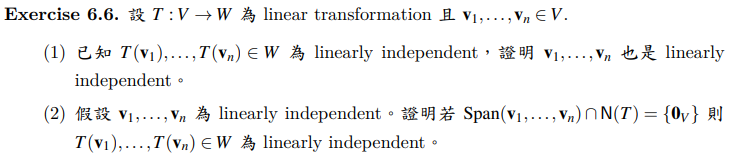
(1) 若 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly dependent,
表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.
\[
c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n = \mathbf{0}_V
\]
則
\[
T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = T(\mathbf{0}_V)
\]
因 \(T\) 為 linear transformation,
\[
c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W
\]
∴ \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly dependent.
故由 contrapositive method(反證法),
知若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n)\) 為 linearly independent,
則 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent.
(2) 若 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly dependent,
表示 \(\exists c_1, \dots, c_n\) 不全為 \(0\),s.t.
\[
c_1 T(\mathbf{v}_1) + \dots + c_n T(\mathbf{v}_n) = \mathbf{0}_W
\]
因 \(T\) 為 linear transformation,
\[
T(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n) = \mathbf{0}_W
\]
∴ \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in N(T)\)
此時由假設 \(\mathbf{v}_1, \dots, \mathbf{v}_n\) 為 linearly independent,且 \(c_1, \dots, c_n\) 不全為 \(0\),知 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \neq \mathbf{0}_V\)
又 \(c_1 \mathbf{v}_1 + \dots + c_n \mathbf{v}_n \in \operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n)\),
∴ \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) \neq \{\mathbf{0}_V\}\)
故由 contrapositive method(反證法),
知若 \(\operatorname{Span}(\mathbf{v}_1, \dots, \mathbf{v}_n) \cap N(T) = \{\mathbf{0}_V\}\),
則 \(T(\mathbf{v}_1), \dots, T(\mathbf{v}_n) \in W\) 為 linearly independent.